
Diego Jiménez-Badillo[1]
INAH-Museo del Templo Mayor
Salvador Ruiz-Correa[2]
IPICYT, iYouthLab
Omar Mendoza-Montoya[3]
Tec de Monterrey, Escuela de Ingeniería y Ciencias
Una de las áreas de aplicación más prometedoras de la computación en las humanidades, particularmente en la arqueología, es el análisis morfológico de objetos del patrimonio cultural. La forma de los objetos es una de las características más relevantes para interpretar su significado. Mediante el estudio de esta propiedad, los investigadores pueden atribuir objetos arqueológicos y obras de arte a estilos artísticos específicos, determinar su cronología y procedencia, situarlos en cierto contexto social, determinar cómo se relaciona la forma con la función de los objetos, o averiguar qué conceptos ideacionales se transmiten a través de su apariencia.
Desafortunadamente, dentro de las humanidades la tarea de analizar la morfología todavía está arraigada en el pasado. Algunos métodos actuales dependen exclusivamente del conocimiento que los investigadores adquieren a través de un largo proceso de aprendizaje empírico, o bien se centran sólo en una clase de objetos y, por lo tanto, no son adecuados para aplicaciones genéricas, y algunos implican tareas tediosas y monótonas como la medición manual de variables elementales de forma. Otros métodos ni siquiera se adaptan a los requisitos específicos de las humanidades o son reduccionistas, en el sentido de que abordan el análisis morfológico observando datos en dos dimensiones sin considerar que la esencia de la mayoría de los objetos del patrimonio cultural solo se puede captar en el espacio tridimensional.
Este artículo reporta resultados del proyecto Shaping Archaeology, orientado a superar dichas limitaciones mediante la creación de metodologías genéricas y herramientas computacionales fáciles de usar, que eventualmente podrían transformar la práctica de la arqueología en beneficio de académicos y estudiantes dedicados a describir, interpretar y difundir nuevos conocimientos obtenidos de la morfología de los artefactos.
Dos desarrollos recientes hacen posible ese objetivo. Por un lado, la madurez de varios subcampos del aprendizaje de máquina, como la visión por computadora en 3D, han producido algoritmos altamente sofisticados para el análisis automático de formas. Por otro lado, la fácil adquisición de datos 3D mediante la aplicación del escaneo láser y la fotogrametría ha permitido a las instituciones culturales emprender proyectos masivos de digitalización de sus colecciones. Estos esfuerzos han producido miles de modelos digitales de artefactos compuestos por vértices, aristas y caras triangulares que modelan la forma del objeto real (figura 1), los cuales pueden aprovecharse más allá de la visualización y documentación de colecciones (Frischer y Dakouri-Hild, 2008; Pintus et al., 2016; Scopigno et al., 2011).
Figura 1. Un modelo 3D, visto como malla de superficie, sólido sin textura y modelo con color y textura.

Fuente: Elaboración propia.
La cooperación entre investigadores del patrimonio cultural y expertos en visión artificial y aprendizaje automatizado ha llevado a una explosión de aplicaciones interesantes para determinar, por ejemplo, la procedencia de las figuras galorromanas (Remondino y El-Hakim, 2006), así como para caracterizar el estilo de importantes obras de arte, como los retratos del emperador Augusto (Lu et al. 2013), los guerreros de terracota chinos (Bevan et al., 2014) y las esculturas romanas clásicas (Zhang et al., 2013). También se han desarrollado aplicaciones para resaltar rasgos poco perceptibles en la superficie de objetos erosionados por el paso del tiempo, como las tabletas cuneiformes (Mara et al., 2010). El análisis geométrico aplicado con regularidad también ayuda a monitorear las deformaciones que sufren algunos objetos debido a las condiciones medioambientales con el paso del tiempo. La restauración de obras fragmentadas (e.g. frescos, bajorrelieves, vasijas, esculturas, etc.) es otra de las aplicaciones que pueden lograrse con la ayuda de algoritmos de visión por computadora, porque éstos indican cómo unir las distintas partes (Huang et al., 2006, Toler-Franklin et al., 2010). La clasificación automática de objetos es una más de las aplicaciones posibles con visión por computadora. Los miembros de Shaping Archaeology hemos desarrollado un nuevo método para la clasificación automática de fragmentos de cerámica que permite determinar, sin intervención del arqueólogo, a qué tipo de vasija pertenece un tepalcate (Jiménez-Badillo y Román-Rangel, 2016 y 2017; Román-Rangel y Jiménez Badillo, 2015; Román Rangel et al., 2014; Román-Rangel et al., 2016a y 2016b). A estas aplicaciones se suman muchas otras, como puede constatarse en la revisión bibliográfica publicada por Pintus et al. (2016).
Además de esas aplicaciones, la creciente producción de modelos digitales 3D ha generado la necesidad de contar con sistemas de búsqueda y recuperación de modelos 3D para la gestión, visualización, clasificación, y recuperación de este tipo de datos. Este artículo describe un proyecto en marcha, dedicado a desarrollar un sistema de reconocimiento automático de objetos que facilite el acceso a los modelos 3D generados por las instituciones culturales.
Un sistema de reconocimiento automático de objetos en 3D
En todo el mundo, existe la necesidad de contar con nuevos métodos de documentación y análisis de objetos del patrimonio cultural. Eso incluye la representación digital de artefactos en tres dimensiones para que las colecciones puedan ser conocidas y estudiadas por todas las personas interesadas, en cualquier parte del mundo, sin tener contacto físico con los objetos.
Gracias a la sorprendente evolución de la fotogrametría y el escaneo láser, es posible modelar la superficie de objetos con muy poco esfuerzo y en un periodo de tiempo relativamente corto (Pieraccini et al., 2001). La adopción continua de estas técnicas en las instituciones culturales ha generado miles, si no es que millones, de modelos digitales 3D valiosos para la investigación y la conservación del patrimonio cultural (Pintus et al., 2016; Scopigno et al., 2011). Lamentablemente, una vez que dichos modelos son almacenados en un repositorio digital, los investigadores y el público en general enfrentan serios obstáculos para acceder en línea a dichos recursos. Ello se debe, sobre todo, a la falta de herramientas de consulta apropiadas para recuperar la información 3D. En la actualidad, la manera convencional para localizar modelos en una base de datos consiste en formular una consulta utilizando palabras clave que describen los rasgos de los objetos buscados, por ejemplo: “recupera todos los modelos 3D correspondientes a cajetes trípodes”. Desafortunadamente, las búsquedas basadas en un texto sólo funcionan si las palabras empleadas pertenecen al vocabulario reconocido por una base de datos en particular, ya que ésta podría reconocer cuenco, pero no cajete (término más común en la arqueología mesoamericana). Otro factor limitante es el idioma en que han sido escritas las descripciones, pues la misma base de datos podría reconocer el término cuenco, pero no las palabras bowl (inglés) ni terrine (francés). Por lo tanto, este método tradicional de consulta resulta inadecuado para búsquedas de propósito general, multilingües, centradas en el análisis de la forma de los objetos.
A fin de superar esas limitaciones y liberar el potencial que tienen los modelos 3D para la investigación arqueológica, los miembros de Shaping Archaeology decidimos implementar una plataforma computacional para automatizar el reconocimiento, la búsqueda, la recuperación y el análisis de modelos 3D. Para lograr ese objetivo, hemos experimentado con distintos métodos y algoritmos de reconocimiento automático de objetos. En el año 2010 presentamos la primera propuesta de un sistema de reconocimiento automático enfocado en la medición de cuatro propiedades de curvatura para caracterizar la forma global de los objetos (Jiménez-Badillo et al., 2013). A partir de entonces, hemos implementado otros descriptores de forma desarrollados por expertos en visión por computadora. Tres de ellos son descritos en este artículo y en otra publicación reciente (Jiménez-Badillo et al., 2023). En esta última se ofrecen detalles técnicos de los algoritmos utilizados, mientras que en este artículo se describen en términos menos técnicos para hacerlos más comprensibles a un público en general.
Nuestra motivación ha sido crear un sistema para procesar búsquedas de objetos almacenados en un repositorio de modelos 3D analizando únicamente sus características geométricas, es decir, sin utilizar textos durante la consulta. Un sistema similar fue implementado por Funkhouser et al. (2003). La gran variedad de clases de objetos pertenecientes a la colección del Museo del Templo Mayor nos ha permitido probar las herramientas desarrolladas en un ambiente real y complejo. El sistema fue diseñado para funcionar de la siguiente manera:
1- El usuario introduce un modelo de consulta, consistente en una nube de puntos o malla de superficie con la forma del tipo de objeto que quiere localizar en la base de datos, de tal manera que este paso reemplaza la introducción de frases de búsqueda como “recupera todas las máscaras con nariz prominente”.
2- A continuación, el sistema compara la geometría del modelo de consulta con la de todos los modelos 3D almacenados en el repositorio. Este paso tiene como fin identificar aquellos que se parecen al modelo de consulta, sin importar si la colección incluye decenas, cientos o miles de ejemplos.
3- Finalmente, el sistema ordena los modelos similares del más al menos parecido y los muestra en la pantalla.
Las operaciones claves del sistema son la determinación de coincidencias de forma y la recuperación automática de los modelos, operaciones que en inglés se denominan shape matching and retrieval. La utilidad de este sistema es obvia en el contexto de los museos, donde a menudo es necesario localizar en línea todos los ejemplares de un tipo de objeto existentes tanto en la colección propia como en los acervos de otras instituciones.
El desarrollo de este tipo de sistemas ha sido tema de investigación desde la década de 1980, especialmente en los campos de visión por computadora, modelado geométrico y aprendizaje automatizado, como lo atestiguan las revisiones bibliográficas publicadas por distintos autores desde entonces (Besl y Jain, 1985; Bustos et al., 2004 y 2005; Campbell y Flynn, 2001; Jain y Mishra, 2014; Lara López et al., 2017; Loncaric, 1998; Tangelder y Veltkamp, 2008; Theologou et al., 2014; Veltkamp y Hagedoorn, 1999).
Descriptores de forma implementados
Ninguna computadora es capaz de comparar formas de manera directa para evaluar semejanzas entre objetos. Por ello es necesario recurrir a métodos que transformen los datos 3D utilizando algoritmos matemáticos con el propósito de obtener una descripción numérica de forma. Dicha descripción consiste en un vector que codifica una o varias características geométricas de los modelos, como el grado de curvatura o la orientación de la superficie alrededor de puntos elegidos al azar en una malla de superficie 3D. El grado de semejanza entre un objeto y otro se establece calculando la distancia entre los vectores de rasgos de sus modelos 3D. Por lo tanto, la eficacia de un sistema de reconocimiento depende de la eficacia de los algoritmos seleccionados para calcular los descriptores de forma. Para implementar el primer prototipo del sistema del Templo Mayor aplicamos tres clases de descriptores matemáticos de forma, que se describen a continuación:
Histogramas de distribución de distancias. Entre los descriptores de forma más sencillos se cuentan aquellos obtenidos a partir de medidas de distancia. Estos fueron propuestos originalmente por Osada et al. (2002). Para obtenerlos, se extraen aleatoriamente miles de puntos de la superficie del modelo 3D y luego se calculan uno o varios de los valores siguientes (cada medida de la lista corresponde a un descriptor de forma):
– Las distancias entre el centroide del modelo y miles de puntos seleccionados aleatoriamente sobre la superficie del mismo.
– Las distancias de miles de pares de puntos elegidos aleatoriamente sobre la superficie del modelo.
– Las áreas de miles de triángulos seleccionados al azar sobre la malla de superficie del modelo. Para formar cada triángulo se seleccionan los vértices aleatoriamente.
– Los volúmenes de miles de tetraedros formados por cuatro puntos aleatorios.
– Los ángulos de miles de pares de vectores que tengan un punto de origen en común.
Los valores obtenidos para cada descriptor se transforman en un histograma de frecuencias (distribución de probabilidad), que representa la forma característica de un objeto y por lo tanto puede compararse con los histogramas de otros modelos 3D para establecer el grado de semejanza entre ellos.
Figura 2. Histogramas de distribución de distancias correspondientes a tres objetos. Nótese que las diferencias en las curvas de los histogramas permiten al sistema de reconocimiento distinguir las diferentes formas de los tres objetos.
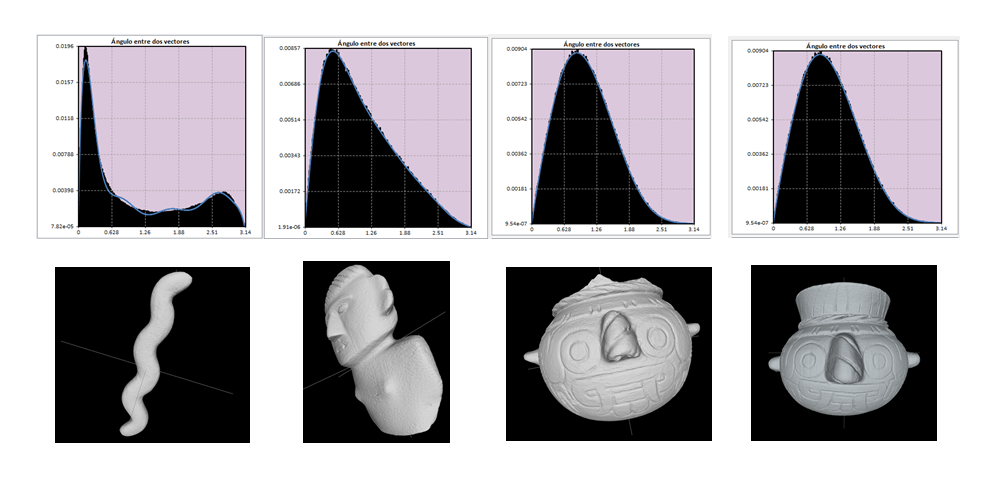
La figura 2 muestra los histogramas resultantes al calcular ángulos entre vectores para cuatro modelos diferentes. Como puede observarse, la distribución de probabilidad para los dos modelos del lado izquierdo es distinta, pues sus formas difieren en que el cetro serpentiforme es largo y ondulado, mientras que la figura antropomorfa es plana y ancha. En contraste, los modelos de la derecha corresponden a dos vasijas Tláloc cuya forma es casi idéntica, lo cual se refleja en sus correspondientes histogramas. A partir de estos ejemplos es fácil comprender cómo el sistema de reconocimiento logra identificar las semejanzas o diferencias entre objetos.
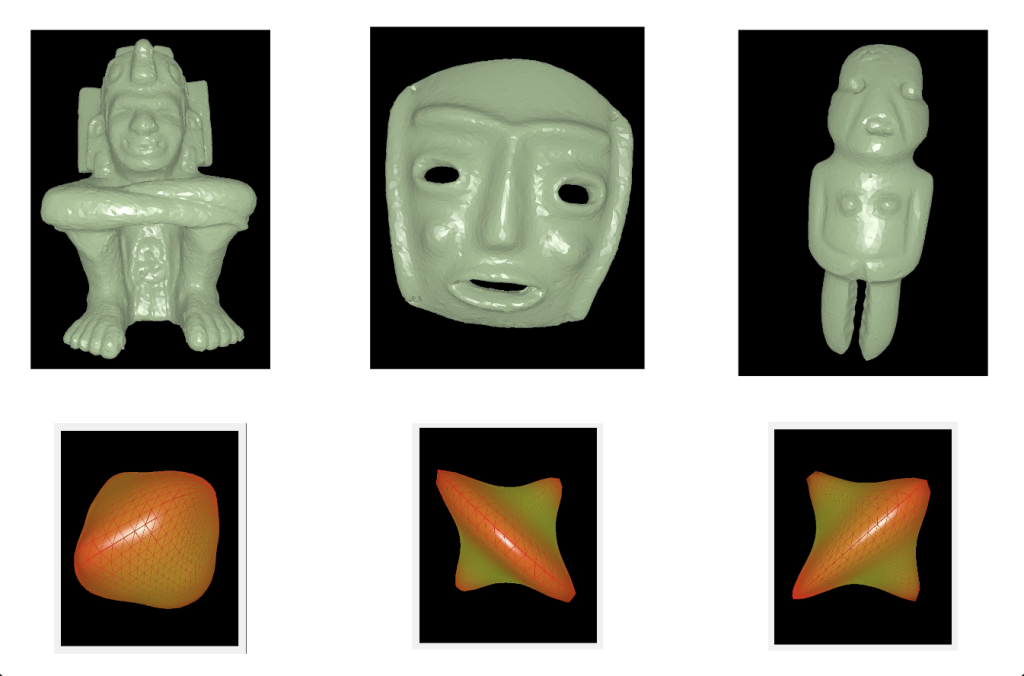
Descriptor de simetría reflexiva. Un segundo descriptor de forma, más difícil de calcular, pero al mismo tiempo más efectivo, es el valor de simetría reflexiva propuesto por Kazhdan et al. (2002, 2004a y 2004b). Este descriptor traza varios planos que pasan por el centroide del modelo para cortarlo en dos mitades, buscando que una parte sea el espejo de la otra. En una forma cuadrada, por ejemplo, existen cuatro líneas que pueden cortar la figura y satisfacer la propiedad de simetría reflexiva. Obviamente, los modelos digitales de objetos arqueológicos son más complejos y casi nunca son perfectamente simétricos. Al cortarlos en varios planos, los valores pueden ir del uno (simetría perfecta) a cifras cercanas a cero si las mitades son demasiado asimétricas. Los valores resultantes de todos los planos de corte forman una gráfica tridimensional, la cual indica cuánto se aleja el modelo 3D de la simetría perfecta. Dicha gráfica sirve, entonces, para comparar ese objeto con otros. La figura 3 ilustra el descriptor de simetría reflexiva obtenido para tres objetos distintos.
Figura 3. Descriptores de simetría reflexiva correspondientes a tres objetos de la colección del Museo del Templo Mayor
Fuente: Elaboración propia.
Descomposición con funciones armónicas. El tercer descriptor se calcula mediante un procedimiento matemático denominado descomposición con funciones armónicas, el cual es difícil de explicar sin utilizar conceptos matemáticos avanzados. Su aplicación al reconocimiento de objetos fue propuesta por Kazhdan y Funkhouser (2002) y Kazhdan et al. (2003), en cuyos artículos puede encontrarse la explicación formal del método. Para el propósito de este artículo, basta decir que se trata de descomponer un objeto complejo en elementos simples derivados de funciones esféricas, cuya suma sea suficiente para reconstituir la forma original. El descriptor consiste en calcular cuántos componentes (es decir, funciones armónicas) son necesarios para descomponer un objeto complejo en sus partes constitutivas.
La función armónica más simple es la esfera. Por lo tanto, si el objeto tiene la forma de un globo, sólo será necesario un componente armónico. Sin embargo, conforme se incrementa la complejidad del modelo, es indispensable calcular otras funciones armónicas para moldear la figura de manera correcta. Un objeto con partes salientes y depresiones, por ejemplo, sólo puede ser modelado si se emplean funciones armónicas con lóbulos. Una representación gráfica de las funciones esféricas armónicas se puede ver en la figura 4.
Figura 4. Representación gráfica de las funciones esféricas armónicas que sirven de base para el cálculo del descriptor de forma.

Fuente: Elaboración propia.
Cabe aclarar que el cálculo de funciones armónicas comienza con una pequeña esfera centrada en el modelo y continúa con esferas más grandes, hasta llegar a los límites del objeto. Esto significa que la descomposición se realiza aplicando esferas de diferentes radios a partir del centroide del modelo. El resultado final es una imagen bidimensional, en la cual se representan los coeficientes de la descomposición para cada función armónica utilizada y cada radio. En la figura 5 se ilustran los descriptores para tres objetos distintos.
Figura 5. Descriptores de funciones armónicas obtenidos para tres objetos distintos.

Elaboración propia.
Descripción del software
El usuario final del sistema de reconocimiento no tiene que preocuparse por implementar los algoritmos de los descriptores, pues las herramientas del sistema automatizan dicha tarea.
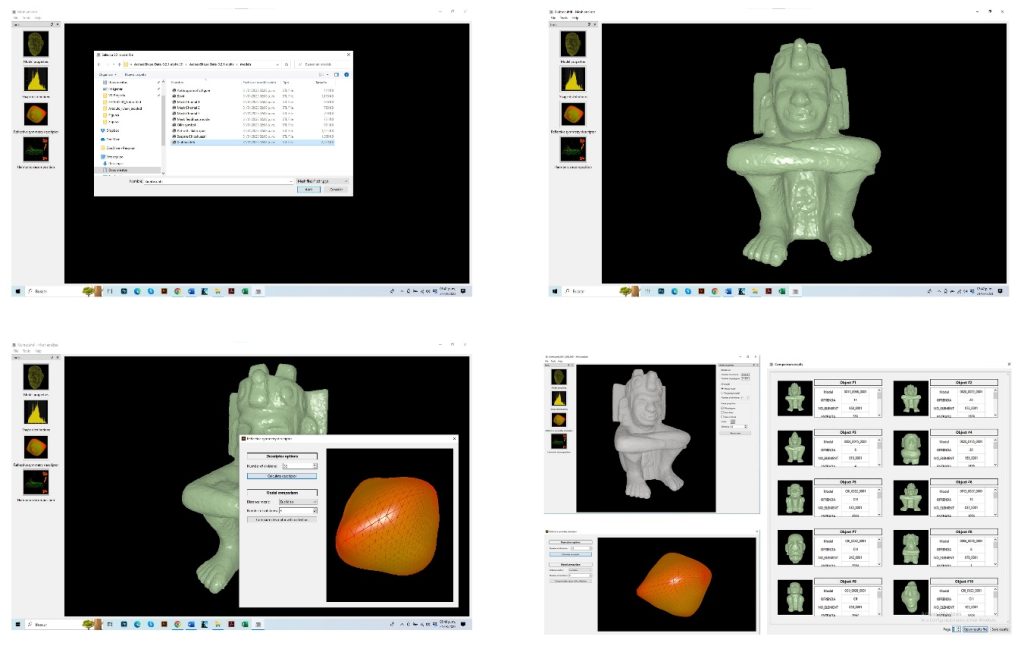
Figura 6. Interfaz de ArcheoShape, el software desarrollado en el curso del proyecto Shaping Archaeology.
Fuente: Elaboración propia.
De izquierda a derecha y de arriba a abajo: (a) Localización del archivo que contiene el modelo de consulta. (b) Carga del modelo de consulta. (c) Cálculo del descriptor de simetría reflexiva para el modelo de consulta. (d) Después de oprimir el botón de comparación del modelo de consulta con la colección de modelos almacenados en la base de datos, el sistema arroja como resultado todos los modelos existentes que se parecen al modelo de consulta. Elaboración propia.
A la fecha, hemos completado el primer módulo (MeshAnalizer) del sistema de reconocimiento denominado ArcheoShape. En la práctica, una búsqueda de información comienza cuando el usuario introduce un modelo de consulta en el sistema. Esto se realiza desde el menú “abrir archivo”, como en cualquier otro programa de computación. Una vez que el usuario carga el modelo 3D de consulta, éste aparece en la pantalla (figura 6).
Posteriormente, el usuario debe indicar cuál de los algoritmos implementados (histogramas de distribución de distancias, simetría reflexiva o funciones armónicas) desea utilizar para calcular el descriptor de forma del modelo de consulta.
Una vez que el sistema tiene el descriptor del modelo de consulta, el sistema procede a comparar ese objeto con el resto de la colección. Para lograrlo, basta oprimir un botón, aunque si el usuario desea, puede modificar previamente algunos parámetros para personalizar el cálculo de similitud.
La comparación, en realidad, consiste en encontrar correspondencias en la forma de los objetos (shape matching). Al finalizar, el sistema es capaz de decidir cuáles objetos del repositorio son suficientemente similares al modelo de consulta, y, a través de un algoritmo de indización, puede ordenar el resultado, mostrando en la pantalla todos los ejemplares encontrados.
Las figuras 6, 7 y 8 ilustran los resultados de tres consultas típicas. En la primera se desea encontrar los ejemplares de Xiuhtecuhtli existentes en la colección del Museo del Templo Mayor; en la segunda se solicita al sistema que encuentre objetos en forma de máscara y en la tercera se solicitan modelos en forma de figura antropomorfa.
Figura 7. Ejemplo de búsqueda y recuperación, aplicado a la recuperación de máscaras de piedra.

Fuente: Elaboración propia.
Figura 8. Ejemplo de búsqueda y recuperación, aplicado a la recuperación de figuras antropomorfas.
Fuente: Elaboración propia.
El software implementado es sólo un primer prototipo de un paquete más complejo, en el cual seguimos trabajando. La versión final incluirá herramientas de análisis de gran utilidad en arqueología, como la clasificación automática de los objetos con base en su forma 3D y el análisis estilístico de los mismos. Consideramos que muchos proyectos de investigación podrán beneficiarse con nuestras aportaciones, y por lo tanto ofrecemos el software y una muestra de datos a quienes estén interesados en utilizarlo. Estos se pueden descargar desde los siguientes repositorios de GitHub y Zenodo (Mendoza-Montoya, 2023a, Mendoza-Montoya 2023b):
Muestra de modelos 3D[5]: https://github.com/omendoza83/ArcheoShape-Data/tree/v0.2.1-alpha and Zenodo: https://doi.org/10.5281/zenodo.7591490 (Mendoza-Montoya, 2023a).
Bibliografía
Besl, Paul J., y Ramesh C. Jain
1985 “Three-dimensional object recognition”, en ACM Computing Surveys, vol. 17, pp. 75-145, https://doi.org/10.1145/4078.4081.
Bevan, Andrew, Xiuzhen Li, Marco Martiñon-Torres, Susan Green, Yin Xia, Kun Zhao, Zhen Zhao, Shengtao Ma, Wei Cao, y Thilo Rehren
2014 “Computer vision, archaeological classification and China’s terracotta warriors”, en Journal of Archaeological Science, vol. 49, pp. 249-254, https://doi.org/10.1016/j.jas.2014.05.01.
Bustos, Benjamin, Daniel Keim, Dietmar Saupe, Tobias Schreck, y Dejan Vranic
2004 “Automatic selection and combination of descriptors for effective 3D similarity search”, en Proceedings of the IEEE Sixth International Symposium on Multimedia Software Engineering, Miami, FL, 13-15 December, 2004, IEEE Computer Society, Los Alamitos, California, pp. 514-521, https://doi.org/10.1109/MMSE.2004.32.
Bustos, Benjamin, Daniel Keim, Dietmar Saupe, Tobias Schreck, y Dejan Vranić
2005 “Feature-based similarity search in 3D object databases”, en ACM Computing Surveys, vol. 37, pp. 345–387, https://doi.org/10.1145/1118890.1118893
Campbell, Richard J. y Patrick J. Flynn
2001 “A survey of free-form object representation and recognition techniques”, en Computer Vision and Image Understanding, vol. 81, pp. 166-210, https://doi.org/10.1006/cviu.2000.0889.
Frischer, Bernard y Anastasia Dakouri-Hild (eds.)
2008 Beyond illustration: 2D and 3D digital technologies as tools for discovery in archaeology. Oxford, Archaeopress (BAR International Series 1805). .
Funkhouser, Thomas, Patrick Min, Michael Kazhdan, Joyce Chen, Alex Halderman, David Dobkin, y David Jacobs
2003 “A search engine for 3D models”, en ACM Transactions on Graphics, vol. 22, pp. 83–105, https://doi.org/10.1145/588272.588279.
Huang, Qi-Xing, Simon Flöry, Natasha Gelfand, Michael Holfer, y Helmut Pottman
2006 “Reassembling Fractured Objects by Geometric Matching”, en ACM Transactions on Graphics, vol. 25, pp. 569-578, https://doi.org/10.1145/1141911.1141925.
Jain, Swati, y Sanjay Mishra
2014 “Survey paper on various 3D view based retrieval methods”, en International Journal of Engineering Research & Technology, vol. 3, núm. 2, pp. 470-473.
Jiménez-Badillo, Diego, Omar Mendoza-Montoya, y Salvador Ruiz-Correa
2023 “Application of computer vision techniques for 3D matching and retrieval of archaeological objects” (enviado para publicación), disponible en https://doi.org/10.12688/f1000research.127095.1
Jiménez-Badillo, Diego y Edgar F. Román-Rangel
2016 “Application of the ´bags-of-words model´ (BoW) for analyzing archaeological potsherds”, en Stefano Campana, Roberto Scopigno, Gabriella Carpentiero y Marianna Cirillo (eds.), CAA 2015. Keep the Revolution Going. Proceedings of the 43rd Annual Conference on Computer Applications and Quantitative Methods in Archaeology, vol. 2, Oxford, Archaeopress, pp. 847-856.
Jiménez-Badillo, Diego y Edgar F. Román-Rangel
2017 “Clasificación automática de fragmentos de vasijas arqueológicas mediante el modelo ´bolsa de palabras´”, en Diego Jiménez-Badillo (ed.), Arqueología Computacional. Nuevos enfoques para el Análisis y la Difusión del Patrimonio Cultural, Ciudad de México, Instituto Nacional de Antropología e Historia.
Jiménez-Badillo, Diego, Salvador Ruiz-Correa, y Wilberth García Alfaro
2013 “Developing a recognition system for the retrieval of archaeological 3D models”, en Francisco Contreras, Maria Farjas y Francisco Javier Melero (eds.), CAA-2010. Fusion of Cultures. Proceedings of the 38th Annual Conference on Computer Applications and Quantitative Methods in Archaeology, Granada, España, abril de 2010. Oxford, Archaeopress (BAR International Series 2494), pp. 325-332, http://dx.doi.org/10.15496/publikation-2209.
Kazdhan, Michael, Bernard Chazelle, David Dobkin, Adam Finkelstein, y Thomas Funkhouser
2002 “A reflective symmetry descriptor”, en Proceedings of the 7th European Conference on Computer Vision, ECCV02, Copenhage, mayo de 2002. Lecture Notes on Computer Sciences, vol. 2352 (Part II), pp. 642-656.
Kazdhan, Michael, Thomas Funkhouser, y Szymon Rusinkiewicz
2003 “Rotation invariant spherical harmonic representation of 3D shape descriptors”, en Leif Kobbelt, Peter Schröder, y Hugues Hoppe (eds.), Proceedings of the 2003 Eurographics/ACM SIGGRAPH Symposium on Geometry Processing (SGP ´03), Goslar, Alemania, Eurographics Association, pp. 156-164, https://dl.acm.org/doi/10.5555/882370.882392.
Kazdhan, Michael, y Thomas Funkhouser
2002 “Harmonic 3D shape matching”, en ACM SIGGRAPH 2002 Conference Abstracts and Applications, Nueva York, Association for Computing Machinery, p. 191, https://doi.org/10.1145/1242073.1242204.
Kazhdan, Michael, Bernard Chazelle, David Dobkin, Thomas Funkhouser, y Szymon Rusinkiewicz
2004a “A Reflective Symmetry Descriptor for 3D Models”, en Algorithmica, vol. 38, pp. 201–225, https://doi.org/10.1007/s00453-003-1050-5.
Kazhdan, Michael, Thomas Funkhouser, y Szymon Rusinkiewicz
2004b “Symmetry descriptors and 3D shape matching”, en Proceedings of the 2004 Eurographics/ACM SIGGRAPH Symposium on Geometry Processing (SGP ’04), Nueva York, Association for Computing Machinery, pp. 115-123, https://doi.org/10.1145/1057432.1057448.
Lara López, Graciela, Adriana Peña Pérez Negrón, Angélica de Antonio Jiménez, Jaime Ramírez Rodríguez y Ricardo Imbert Paredes
2017 “Comparative analysis of shape descriptors for 3D objects”, en Multimedia Tools and Applications, vol. 76, pp. 6993-7040, https://doi.org/10.1007/s11042-016-3330-5.
Loncaric, Sven
1998 “A survey of shape analysis techniques”, en Pattern Recognition, vol. 31, pp. 983-1001, https://doi.org/10.1016/S0031-2023(97)00122-2.
Lu, Min, YuJin Zhang, Bo Zheng, Takeshi Masuda, Sintaro Ono, Takeshi Oishi, Kyoko Sengoku-Haga, y Katsushi Ikeuchi
2013 “Portrait sculptures of Augustus: Categorization via local shape comparison”, en Proceedings of the 2013 Digital Heritage International Congress (DigitalHeritage), Marsella, Francia, pp. 661-664, https://doi.org/10.1109/DigitalHeritage.2013.6743812.
Mara, Hubert; Susanne Krömker, Stefan Jakob, y Bernd Breuckmann
2010 “GigaMesh and gilgamesh:–3D multiscale integral invariant cuneiform character extraction”, en Alessandro Artussi (ed.), Proceedings of the 11th International Conference on Virtual Reality, Archaeology and Cultural Heritage VAST´10, Goslar, Alemania, Eurographics Association, pp. 131–138.
Mendoza-Montoya, Omar
2023a ArcheoShape Data: omendoza83/ArcheoShape-Data: ArcheoShape 0.2 (v0.2.1-alpha). Zenodo. https://doi.org/10.5281/zenodo.7591490.
Mendoza-Montoya, Omar
2023b ArchaeoShape online repository: omendoza83/ArcheoShape: ArcheoShape 0.3 (v0.3.0-alpha). Zenodo. https://doi.org/10.5281/zenodo.7583722.
Osada, Robert, Thomas Funkhouser, Bernard Chazelle y David Dobkin
2002 “Shape Distributions”, en ACM Transactions on Graphics, vol. 21, pp. 807 – 832.
Pieraccini, Massimiliano, Gabriele Guidi, y Carlo Atzeni
2001 “3D digitizing of cultural heritage”, en Journal of Cultural Heritage, vol. 2, pp. 63-70.
Pintus, Ruggero, Kasim Pal, Ying Yang, Tim Weyrich, Enrico Gobbetti y Holly Rushmeier
2016 “A survey of geometric analysis in cultural heritage”, en Computer Graphics Forum, vol. 35, núm. 1, pp. 4–31.
Remondino, Fabio, y Sabry El-Hakim
2006 “Image-based 3D Modelling: A review”, en Photogrammetric Record, vol. 21, núm. 115, pp. 269-291, https://doi.org/10.1111/j.1477-9730.2006.00383.x.
Román-Rangel, Edgar F. y Diego Jiménez-Badillo
2015 “Similarity analysis of archaeological potsherds using 3D surfaces”, en Jesús Ariel Carrasco-Ochoa et al. (eds.), Proceedings of the 7th Mexican Conference on Pattern Recognition, Ciudad de México, 24 al 27 de junio de 2015, Cham, Suiza, Springer International Publishing (Lecture Notes in Computer Science 9116), pp. 125–134, https://doi.org/10.1007/978-3-319-19264-2_13.
Roman-Rangel, Edgar F., Diego Jimenez-Badillo y Estivaliz Aguayo-Ortiz
2014 “Categorization of Aztec potsherds using 3D local descriptors”, en C. Jawahar y S. Shan (eds.), Computer Vision. ACCV 2014 Workshops. Revised Selected Papers Part II, Singapur, 1 y 2 de noviembre de 2014, Cham, Suiza, Springer (Lecture Notes in Computer Science 9009), pp. 567-582, https://doi.org/10.1007/978-3-319-16631-5_42.
Román-Rangel, Edgar F., Diego Jiménez-Badillo y Stephane Marchand-Maillet
2016a “Classification and Retrieval of Archaeological Potsherds Using Histograms of Spherical Orientations”, en ACM Journal of Computing and Cultural Heritage, vol. 9, núm. 3, art. 17, 23 pp., https://doi.org/10.1145/2948069.
Román-Rangel, Edgar F., Diego Jiménez-Badillo y Stephane Marchand-Maillet
2016b “Rotation invariant local shape descriptors for classification of archaeological 3D models”, en José Francisco Martínez Trinidad et al. (eds.), Proceedings of the 8th Mexican Conference on Pattern Recognition, Guanajuato, Mexico, 22 y 23 de junio de 2016, Cham, Suiza, Springer International Publishing (Lecture Notes in Computer Science 9703), pp. 13–22, https://doi.org/10.1007/978-3-319-39393-3_2.
Scopigno, Roberto, Marco Callieri, Paolo Cignoni, Massimiliano Corsini, Matteo Dellepiane, Federico Ponchio, y Guido Ranzuglia
2011 “3D models for Cultural Heritage: Beyond plain visualization”, en Computer, vol. 44, núm. 7, pp. 48-55, https://doi.org/10.1109/MC.2011.196.
Tangelder, Johan W. H. y Rempco C. Veltkamp
2008 “A survey of content based 3D shape retrieval methods”, en Multimedia Tools and Applications, vol. 39, pp. 441-471, https://doi.org/10.1007/s11042-007-0181-0.
Theologou, Panagiotis, Ioannis Pratikakis y Theoharis Theoharis
2014 “A Review on 3D Object Retrieval Methodologies Using a Part-Based Representation”, en Computer-Aided Design and Applications, vol. 11, pp. 670-684, https://doi.org/10.1080/16864360.2014.914385.
Toler-Franklin, Corey, Benedict Brown, Tim Weyrich, Thomas Funkhouser, y Szymon Rusinkiewicz
2010 “Multi-Feature Matching of Fresco Fragments”, en ACM Transactions on Graphics, vol. 29, núm. 6, art. 185, 12 pp., https://doi.org/10.1145/1882261.1866207.
Veltkamp, Remco C., y Michiel Hagedoorn
1999 “State-of-the-art in shape matching”. Reporte técnico, UU-CS-1999-27, Universidad de Utrecht, Países Bajos, disponible en https://www.researchgate.net/publication/2522284_State-of-the-Art_in_Shape_Matching [consultado el 20 de marzo de 2022].
Zhang, Yujin, Min Lu, Bo Zheng, Takeshi Masuda, Shintaro Ono, Takeshi Oishi, Kyoko Sengoku-Haga, y Katsushi Ikeuchi
2013 “Classical sculpture analysis via shape comparison”, en Proceedings of the 2013 International Conference on Culture and Computing, Kyoto, Japón, pp. 57-61, https://doi.org/10.1109/CultureComputing.2013.18.
[1] diego_jimenez@inah.gob.mx
[2] salvador.ruiz@ipicyt.edu.mx
[3] omendoza83@tec.mx
[4] El software esta disponible bajo una licencia MIT.
[5] Los modelos son accesibles bajo la Creative Commons Attribution-NonCommercial-NoDerivatives 4.0 International Public License.